2学年
シーケンス制御Ⅰ

シーケンス制御とは、洗濯機のように決められた手順を自動で行わせるための制御方法です。
この実習では、リレー(電磁石のはたらきで動作するスイッチ)を用いてLEDランプの点灯回路を配線して動作確認をします。
二組のリレー、押しボタンスイッチ、LEDランプを使って、2つのLEDをどのように点灯、消灯させるのかを考えながら、配線をして回路を組み、動作確認を通してシーケンス制御回路の基礎を学びます。
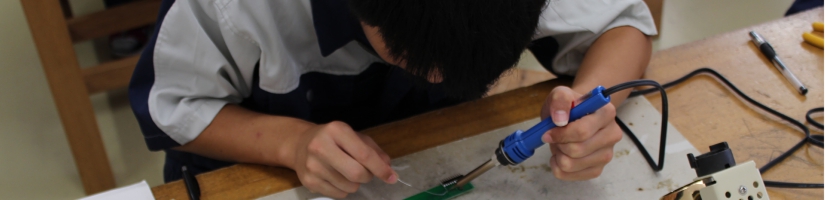
PICプログラミング入門

1年生の時に製作したPICマイコンボード(基板)を使用して、プログラミングの基礎を学習します。プログラミング言語はC言語を使います。基板に搭載されているLEDを順番に点灯させたり、スイッチの入力状態によりLEDを自由に点灯させるプログラムを作成します。
マイコン制御ロボット

2年生でマイコンを使ったライントレースロボットを製作します。ロボットにはセンサが取り付けられており、センサの状態を読み取って、黒いシートに貼られた白いテープをなぞりながら自動で走行できるよう、マイコンやC言語について学習しながらプログラムを作成していきます。
センサの特性とDCモータ特性

2年生で製作するライントレースロボットに取り付けるセンサや直流(DC)モータ、ギヤの原理について学習していきます。センサは赤外光の特性をどのように利用すれば色を識別できるのか。駆動部分であるモータやギヤの性質など、実験を通して知識を深めていきます。
PowerPoint/コンピュータ総合演習

これから先、パソコンやタブレットを用いて発表を行う力が必要になることが多いと思われます。そのために、PowerPointの使い方や、アニメーションや画像の挿入などの各機能について知り、PowerPointを用いて発表することができるよう学習します。実習内では、実際にパソコンを用いて、1人1つスライドを作成し、発表を行います。
シーケンス制御Ⅱ
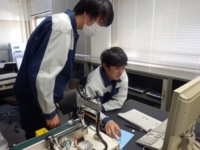
PLCという装置を用いてベルトコンベアやアームロボットなどのFA(Factory Automation)装置の制御を行います。
コンピューターで回路設計を行い、PLCにそのデータを転送して動作確認をします。工場などの自動運転に用いられるシステムの基礎を学びます。
ダイオードの特性・電源回路

LED電球、身の回りの表示装置に使われているLED(発光ダイオード)や整流回路に使われるダイオードなど特性を測定し、ダイオードについて理解を深めます。
交流を直流に変換する回路である整流回路と平滑回路を構成しているダイオードとコンデンサについて実験を行い、電源回路について学びます。
直流機の取り扱い

電気機器の一つである直流モータの特性試験をします。直流モータは「フレミングの左手の法則」にしたがって力が発生し固定子の中に配置されている、回転子が回転します。モータの速度制御を行う方法に界磁制御法、抵抗制御法があります。これらの方法によりモータの回転数と電流の関係を調べます。測定したデータをもとにそれぞれの制御法の特徴を理解します。

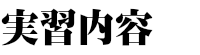
マイコン制御ロボット 車体製作

3年時に電気科で行われるロボットレース大会で走らせるライントレースロボットの車体を1人1台製作します。ライントレースロボットとは、白線に沿って自動的に走るロボットのことです。3種類の基板にさまざまな部品をはんだ付けし、組み立てます。その後、プログラムを書き込み、動作
チェックを行います。
どれだけ丁寧に作ることができるかでロボットの走りが違います。
直流安定化電源の製作

交流100Vを直流2~20Vに変換する電源装置を電気回路製作、ケース加工、内部配線等すべて自分で行います。
整流および平滑回路をプリント基板へ電子部品をはんだ付けして製作し、アルミニウムのケースにポンチを打ち、ドリル等で穴を開け、部品を固定した後、配線を行います。
組立後、動作試験を行い問題がなければ完成です。完成後は、マイコン制御ロボットのバッテリー充電などに活用します。
直列共振回路
抵抗(R)、インダクタンス(L)、コンデンサ(C)による、RL直列回路、RC直列回路、RLC直列回路の周波数特性について実験を行います。
座学ですでに学習している、周波数を変化させた時の電流の流れにくさや電流の変化を実際に見て、理論と実験結果を比較します。
トランジスタの特性の測定と増幅回路
トランジスタは、ラジオ受信機やテレビジョン受信機などの電子機器に広く利用されています。この実習では、トランジスタについての構造や性質・動作について学習すると共に、トランジスタの大きな特徴でもある、電流増幅特性をいかした電流増幅回路の設計・製作を行い、実験を通じてその回路特性についても学習します。